

两轮直立车是由电力驱动、能够自我平衡的两轮车,目前已经作为交通工具广泛地应用在了个人交通、室内场馆巡视、工作巡视、警察巡逻等多个方面,且应用范围还在逐渐扩大。在本次研究中,将对两轮直立车当中的平衡控制系统进行分析。 1 设计方案 考虑到传感器能够感应的电压信号较小,因此通过集成运放将信号扩大,接着将信号检波成直流电平并送入AD口。同步输入编码器信号,通过输入捕捉通道计算出两轮直立车的行驶速度。 通过PID控制算法,对舵机进行控制,并通过连续控制函数对数值进行修正,保证转向的精确性和连续性。将驱动电机的频率设置为8kHZ,并对电机的输出功率进行调整。通过LC并联谐振,得到电磁信号,该信号是模拟信号。对两轮直立车轮子的转速进行改变,从而实现对两轮车方向、速度以及平衡的控制。这是因为在传感器当中,有用来检测方向的电感,用来检测速度的旋转编码器,用来检测平衡的加速度计和陀螺仪。注意在控制车模的方向、速度和直立这3个环节当中,都应该使用PID控制,其输出量会通过对电机运动的叠加控制完成。具体分析:通过PD控制车模的方向,通过PI控制车模的速度,通过PD控制车模的倾角。值得注意的是,在调节速度的过程中,应做到平滑和缓慢,这是因为车模属于非最小的相位系统,如果反馈控制的速度和比例过大,那么很容易导致正反馈,从而打破系统的稳定性,使车模失控。 2 二轮直立车平衡控制系统硬件系统的设计 图 1 为硬件的结构图。 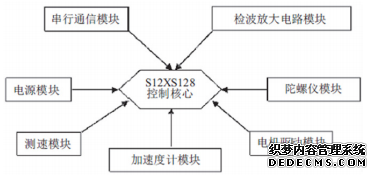 以模块化为主要的设计思想和指导,对硬件的系统进行设计。在测速模块当中,将光栅当作测速的传感器,对速度进行每5ms的计算,并在每50ms对速度进行一次调整,400个脉冲为1m/s的速度,要求精度达到0.25cm/脉冲。这样的设计完全能够满足智能车的行走和控制。 两轮直立车的核心就是电源,在设计时,要求尽量的简单和稳定,并能够满足车辆行驶所需。通过两片TPS7350分别为单片机和直立传感器及检波电路供电,而且通过测试发现性能良好。车模的直立传感器是用来检测当前的倾角,并对倾角的变化率进行预估和测定,但是各有分工:加速度传感器MMA7260用来检测倾角,而陀螺仪ENC-03MB用来检测倾角的变化率。通过双电源运放的使用,能够加大输出的直流电压。但是在设计中我们必须注意到,高精度多圈的滑动变阻器的使用会对信号产生较大的影响,两轮直立车容易在弯道处出现电压突变,因此必须进行改善或修正。而如果使用单电源进行供电,就必须考虑到需要放大的信号非常弱,所以单位增益宽带至少要在1M以上,才能较为优秀地对小的、弱的信号较小放大。通过反复的修正和对比,最后在设计中使用了NE5532放大电路,对谐振电压进行放大。该放大电路具有线性度好、避免信号失真、放大电路简单等优点,我们发现,在该放大电路中,只要存在2.5V左右的抬压,哪怕是一个,也可以不用负电压,这样能够方便电路的设计和优化。放大电路如图 2 所示。 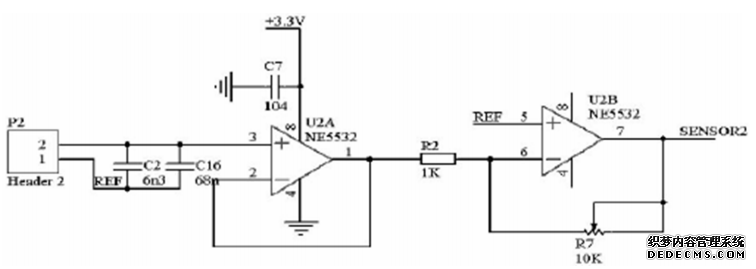 图 2 NE5532 放大电路 3 软件控制的流程图(图 3) 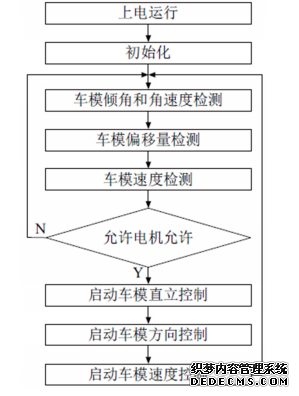 图 3 两轮直立车设计主程序流程图 各个功能模块均通过C语言编程对子函数进行编写。通过上图可知,需要编写的功能模块包括了:各个传感器信号的处理和采集;车模的方向控制、速度控制和直立控制、电机PWM输出;车模的状态监控;车模的启动和结束监控;程序的初始化等。 4 结束语 综上所述,相较于四轮车来说,两轮直立车的行动更加的方便和灵活,这主要是因为两轮车能够大大减少转弯时的半径。两轮直立车通过电磁传感器对路径信息进行采集,从而实现对方向的控制,并通过采集速度信号,实现对速度的控制。随着研究的深入和发展,两轮直立车的平衡控制系统会更加的优化和完善,使两轮直立车在生活中得到更加广泛的运用。 【参考文献】 [1]王悦,杨文超,陈晓琴等.基于飞思卡尔单片机的两轮车控制系统设计 [J]. 电子世界 ,2013,29(13):10-11. [2]王一帆.两轮自平衡小车平衡控制系统的品质研究[D].西安电子科技大学 ,2011. [3]魏文,段晨东,高精隆等.基于数据融合的两轮自平衡小车控制系统设计[J].电子技术应用 ,2013,39(15):179-181,85. [4]薛凡,孙京诰,严怀成等.两轮平衡车的建模与控制研究[J].化工自动化及仪表 ,2012,39(11):1450-1454,1497. |
| 在线咨询: |
|
| 联系电话: | 18602588568 |
| 投稿邮箱: | bosslunwen@126.com |
| ★诚信★专业★权威★快速★ | |

